- Authors
- Sébastien Loriot, Mael Rouxel-Labbé, and Ilker O. Yaz
Introduction
Geometric models, whether acquired through imprecise tools or imperfect processes, frequently exhibit defects such as inconsistent orientations, degeneracies, gaps, missing data, non-manifold features, or self-intersections.
This CGAL package provides a comprehensive set of functions to detect and address both combinatorial and geometric defects. The first part of this documentation focuses on combinatorial repairs, with particular attention to orienting and repairing polygon soups—a necessary step to obtain a valid combinatorial polygon mesh structure. The second part describes functions for geometric repairs, such as removing nearly degenerate faces, or filling holes.
Orientation
This package offers multiple functions to compute consistent face orientations for set of faces (Section Polygon Soups) and polygon meshes (see Section Polygon Meshes).
Polygon Soups
When the faces of a polygon mesh are given but the connectivity is unknown, this set of faces is called a polygon soup.
Before running any of the algorithms on a polygon soup, one should ensure that the polygons are consistently oriented. To do so, this package provides the function CGAL::Polygon_mesh_processing::orient_polygon_soup(), described in [1].
To deal with polygon soups that cannot be converted to a combinatorially manifold surface, some points must be duplicated. Because a polygon soup does not have any connectivity (each point has as many occurrences as the number of polygons it belongs to), duplicating one point (or a pair of points) amounts to duplicating the polygon to which it belongs. The duplicated points are either an endpoint of an edge incident to more than two polygons, an endpoint of an edge between two polygons with incompatible orientations (during the re-orientation process), or more generally a point p at which the intersection of an infinitesimally small ball centered at p with the polygons incident to it is not a topological disk.
Once the polygon soup is consistently oriented, possibly with duplicated points, connectivity can be recovered and made consistent to build a valid polygon mesh. The function CGAL::Polygon_mesh_processing::polygon_soup_to_polygon_mesh() performs this mesh construction step.
Example: PMP_Mesh_repair/orient_polygon_soup_example.cpp
Show / Hide
#include <CGAL/Exact_predicates_inexact_constructions_kernel.h>
#include <CGAL/Polyhedron_3.h>
#include <CGAL/Polyhedron_items_with_id_3.h>
#include <CGAL/Polygon_mesh_processing/orient_polygon_soup.h>
#include <CGAL/Polygon_mesh_processing/polygon_soup_to_polygon_mesh.h>
#include <CGAL/Polygon_mesh_processing/orientation.h>
#include <CGAL/IO/polygon_soup_io.h>
#include <fstream>
#include <iostream>
#include <string>
#include <vector>
{
void non_manifold_edge(std::size_t id1, std::size_t id2, std::size_t nb_poly)
{
std::cout << "The edge " << id1 << ", " << id2 << " is not manifold: " << nb_poly << " incident polygons." << std::endl;
}
void non_manifold_vertex(std::size_t id, std::size_t nb_cycles)
{
std::cout << "The vertex " << id << " is not manifold: " << nb_cycles << " connected components of vertices in the link." << std::endl;
}
void duplicated_vertex(std::size_t v1, std::size_t v2)
{
std::cout << "The vertex " << v1 << " has been duplicated, its new id is " << v2 << "." << std::endl;
}
void vertex_id_in_polygon_replaced(std::size_t p_id, std::size_t i1, std::size_t i2)
{
std::cout << "In the polygon " << p_id << ", the index " << i1 << " has been replaced by " << i2 << "." << std::endl;
}
void polygon_orientation_reversed(std::size_t p_id)
{
std::cout << "The polygon " << p_id << " has been reversed." << std::endl;
}
};
int main(int argc, char* argv[])
{
const std::string filename = (argc > 1) ? argv[1] :
CGAL::data_file_path(
"meshes/tet-shuffled.off");
std::vector<K::Point_3> points;
std::vector<std::vector<std::size_t> > polygons;
{
std::cerr << "Cannot open file " << std::endl;
return EXIT_FAILURE;
}
Visitor visitor;
Mesh mesh;
int index = 0;
for(Mesh::Face_iterator fb=mesh.facets_begin(), fe=mesh.facets_end(); fb!=fe; ++fb)
fb->id() = index++;
std::ofstream out("tet-oriented1.off");
out.precision(17);
out << mesh;
out.close();
std::ofstream out2("tet-oriented2.off");
out2.precision(17);
out2 << mesh;
out2.close();
return EXIT_SUCCESS;
}
bool read_polygon_soup(const std::string &fname, PointRange &points, PolygonRange &polygons, const NamedParameters &np=parameters::default_values())
void polygon_soup_to_polygon_mesh(const PointRange &points, const PolygonRange &polygons, PolygonMesh &out, const NamedParameters_PS &np_ps=parameters::default_values(), const NamedParameters_PM &np_pm=parameters::default_values())
builds a polygon mesh from a soup of polygons.
Definition: polygon_soup_to_polygon_mesh.h:330
bool orient_polygon_soup(PointRange &points, PolygonRange &polygons, const NamedParameters &np=parameters::default_values())
tries to consistently orient a soup of polygons in 3D space.
Definition: orient_polygon_soup.h:543
void reverse_face_orientations(PolygonMesh &pmesh)
reverses for each face the order of the vertices along the face boundary.
Definition: orientation.h:274
void orient_to_bound_a_volume(TriangleMesh &tm, const NamedParameters &np=parameters::default_values())
orients the connected components of tm to make it bound a volume.
Definition: orientation.h:1347
bool is_closed(const FaceGraph &g)
std::string data_file_path(const std::string &filename)
Default visitor model of PMPPolygonSoupOrientationVisitor.
Definition: orient_polygon_soup.h:50
Inversely, a polygon soup can be constructed from a polygon mesh, using the function CGAL::Polygon_mesh_processing::polygon_mesh_to_polygon_soup().
Polygon Meshes
This package provides functions for orienting faces in a closed polygon mesh:
The following example demonstrates how to repair and orient a soup to obtain a mesh from a reference:
Example: PMP_Mesh_repair/orientation_pipeline_example.cpp
Show / Hide
#include <CGAL/Exact_predicates_inexact_constructions_kernel.h>
#include <CGAL/Surface_mesh.h>
#include <CGAL/Polygon_mesh_processing/orientation.h>
#include <CGAL/Polygon_mesh_processing/polygon_soup_to_polygon_mesh.h>
#include <CGAL/Polygon_mesh_processing/orient_polygon_soup_extension.h>
#include <CGAL/Polygon_mesh_processing/IO/polygon_mesh_io.h>
#include <CGAL/algorithm.h>
#include <CGAL/Timer.h>
#include <CGAL/IO/polygon_soup_io.h>
#include <algorithm>
#include <cstdlib>
#include <iostream>
#include <string>
#include <vector>
typedef K::Point_3 Point_3;
namespace PMP = CGAL::Polygon_mesh_processing;
int main(int argc, char** argv)
{
const std::string input_filename = (argc < 2) ?
CGAL::data_file_path(
"meshes/blobby-shuffled.off") : argv[1];
const std::string reference_filename = (argc < 2) ?
CGAL::data_file_path(
"meshes/blobby.off") : argv[2];
std::vector<Point_3> points;
std::vector<std::vector<std::size_t> > polygons;
points.size() == 0 || polygons.size() == 0)
{
std::cerr << "Error: can not read input file.\n";
return 1;
}
Mesh ref1;
if(!PMP::IO::read_polygon_mesh(reference_filename, ref1))
{
std::cerr << "Invalid input." << std::endl;
return 1;
}
PMP::orient_triangle_soup_with_reference_triangle_mesh<CGAL::Sequential_tag>(ref1, points, polygons);
Mesh poly;
typedef boost::property_map<Mesh, CGAL::dynamic_face_property_t<std::size_t> >::type Fccmap;
return 0;
}
bool is_polygon_soup_a_polygon_mesh(const PolygonRange &polygons)
returns true if the soup of polygons defines a valid polygon mesh that can be handled by CGAL::Polygo...
Definition: polygon_soup_to_polygon_mesh.h:195
boost::property_traits< FaceComponentMap >::value_type connected_components(const PolygonMesh &pmesh, FaceComponentMap fcm, const NamedParameters &np=parameters::default_values())
void merge_reversible_connected_components(PolygonMesh &pm, const NamedParameters &np=parameters::default_values())
reverses the connected components of tm having compatible boundary cycles that could be merged if the...
Definition: orientation.h:1456
bool duplicate_non_manifold_edges_in_polygon_soup(PointRange &points, PolygonRange &polygons)
duplicates each point p at which the intersection of an infinitesimally small ball centered at p with...
Definition: orient_polygon_soup_extension.h:65
Combinatorial Repair
Polygon Soup Repairing
To ensure that a polygon soup can be oriented (see Section Polygon Soups) and transformed into a usable polygon mesh, it might be necessary to preprocess the data to remove combinatorial and geometrical errors. This package offers the following functions:
as well as the function CGAL::Polygon_mesh_processing::repair_polygon_soup(), which bundles the previous functions and an additional handful of repairing techniques to obtain an as-clean-as-possible polygon soup.
Stitching
When handling polygon meshes, it might happen that a mesh has several edges and vertices that are duplicated. For those edges and vertices, the connectivity of the mesh is incomplete, if not considered incorrect.
Stitching the borders of a polygon mesh can be done to fix some of the duplication. It consists in two main steps. First, border edges that are geometrically identical but duplicated are detected and paired. Then, they are "stitched" together so that edges and vertices duplicates are removed from the mesh, and each of these remaining edges is incident to exactly two faces.
The functions CGAL::Polygon_mesh_processing::stitch_boundary_cycle(), CGAL::Polygon_mesh_processing::stitch_boundary_cycles(), and CGAL::Polygon_mesh_processing::stitch_borders() can perform such repairing operations: the first two functions can be used to stitch halfedges that are part of the same boundary(ies), whereas the third function is more generic and can also stitch halfedges that live on different borders.
The input mesh should represent a manifold surface; otherwise, stitching may not succeed.
Stitching Example
The following example applies the stitching operation to a simple quad mesh with duplicated border edges.
Example: PMP_Mesh_repair/stitch_borders_example.cpp
Show / Hide
#include <CGAL/Exact_predicates_inexact_constructions_kernel.h>
#include <CGAL/Polyhedron_3.h>
#include <CGAL/Polygon_mesh_processing/stitch_borders.h>
#include <CGAL/Polygon_mesh_processing/IO/polygon_mesh_io.h>
#include <iostream>
#include <string>
namespace PMP = CGAL::Polygon_mesh_processing;
int main(int argc, char* argv[])
{
const std::string filename = (argc > 1) ? argv[1] :
CGAL::data_file_path(
"meshes/quads_to_stitch.off");
Mesh mesh;
if(!PMP::IO::read_polygon_mesh(filename, mesh))
{
std::cerr << "Invalid input." << std::endl;
return 1;
}
std::cout << "Before stitching : " << std::endl;
std::cout << "\t Number of vertices :\t" << mesh.size_of_vertices() << std::endl;
std::cout << "\t Number of halfedges :\t" << mesh.size_of_halfedges() << std::endl;
std::cout << "\t Number of facets :\t" << mesh.size_of_facets() << std::endl;
std::cout << "Stitching done : " << std::endl;
std::cout << "\t Number of vertices :\t" << mesh.size_of_vertices() << std::endl;
std::cout << "\t Number of halfedges :\t" << mesh.size_of_halfedges() << std::endl;
std::cout << "\t Number of facets :\t" << mesh.size_of_facets() << std::endl;
return 0;
}
std::size_t stitch_borders(PolygonMesh &pmesh, const HalfedgePairsRange &hedge_pairs_to_stitch, const NamedParameters &np=parameters::default_values())
stitches together border halfedges in a polygon mesh.
Definition: stitch_borders.h:1306
bool write_polygon_mesh(const std::string &fname, Graph &g, const NamedParameters &np=parameters::default_values())
Polygon Mesh Manifoldness
Non-manifold vertices can be detected using the function CGAL::Polygon_mesh_processing::is_non_manifold_vertex(). The function CGAL::Polygon_mesh_processing::duplicate_non_manifold_vertices() can be used to attempt to create a combinatorially manifold surface mesh by splitting any non-manifold vertex into as many vertices as there are manifold sheets at this geometric position. Note however that the mesh will still not be manifold from a geometric point of view, as the positions of the new vertices introduced at a non-manifold vertex are identical to the input non-manifold vertex.
Manifoldness Repair Example
In the following example, a non-manifold configuration is artificially created and fixed with the help of the functions described above.
Example: PMP_Mesh_repair/manifoldness_repair_example.cpp
Show / Hide
#include <CGAL/Exact_predicates_inexact_constructions_kernel.h>
#include <CGAL/Surface_mesh.h>
#include <CGAL/Polygon_mesh_processing/repair.h>
#include <CGAL/Polygon_mesh_processing/IO/polygon_mesh_io.h>
#include <CGAL/boost/graph/iterator.h>
#include <iostream>
#include <iterator>
#include <string>
#include <vector>
namespace PMP = CGAL::Polygon_mesh_processing;
typedef boost::graph_traits<Mesh>::vertex_descriptor vertex_descriptor;
typedef boost::graph_traits<Mesh>::halfedge_descriptor halfedge_descriptor;
void merge_vertices(vertex_descriptor v_keep, vertex_descriptor v_rm, Mesh& mesh)
{
std::cout << "merging vertices " << v_keep << " and " << v_rm << std::endl;
set_target(h, v_keep, mesh);
remove_vertex(v_rm, mesh);
}
int main(int argc, char* argv[])
{
Mesh mesh;
if(!PMP::IO::read_polygon_mesh(filename, mesh) ||
CGAL::is_empty(mesh))
{
std::cerr << "Invalid input." << std::endl;
return 1;
}
vertex_descriptor v0 = *(vertices(mesh).begin());
vertex_descriptor v1 = *(--(vertices(mesh).end()));
merge_vertices(v0, v1, mesh);
int counter = 0;
for(vertex_descriptor v : vertices(mesh))
{
{
std::cout << "vertex " << v << " is non-manifold" << std::endl;
++counter;
}
}
std::cout << counter << " non-manifold occurrence(s)" << std::endl;
std::vector<std::vector<vertex_descriptor> > duplicated_vertices;
NP::output_iterator(
std::back_inserter(duplicated_vertices)));
std::cout << new_vertices_nb << " vertices have been added to fix mesh manifoldness" << std::endl;
for(std::size_t i=0; i<duplicated_vertices.size(); ++i)
{
std::cout << "Non-manifold vertex " << duplicated_vertices[i].front() << " was fixed by creating";
for(std::size_t j=1; j<duplicated_vertices[i].size(); ++j)
std::cout << " " << duplicated_vertices[i][j];
std::cout << std::endl;
}
return EXIT_SUCCESS;
}
bool is_non_manifold_vertex(typename boost::graph_traits< PolygonMesh >::vertex_descriptor v, const PolygonMesh &pm)
returns whether a vertex of a polygon mesh is non-manifold.
Definition: manifoldness.h:52
std::size_t duplicate_non_manifold_vertices(PolygonMesh &pm, const NamedParameters &np=parameters::default_values())
duplicates all the non-manifold vertices of the input mesh.
Definition: manifoldness.h:428
bool is_empty(const FaceGraph &g)
Iterator_range< Halfedge_around_target_iterator< Graph > > halfedges_around_target(typename boost::graph_traits< Graph >::halfedge_descriptor h, const Graph &g)
Duplicated Vertices in Boundary Cycles
Similarly to the problematic configuration described in the previous section, another issue that can be present in a polygon mesh is the occurrence of a "pinched" hole, that is the configuration where, when starting from a border halfedge and walking the halfedges of this border, a geometric position appears more than once (although, with different vertices) before reaching the initial border halfedge again. The functions CGAL::Polygon_mesh_processing::merge_duplicated_vertices_in_boundary_cycle() and CGAL::Polygon_mesh_processing::merge_duplicated_vertices_in_boundary_cycle(), which merge vertices at identical positions, can be used to repair this configuration. During the operation, the boundary cycle is split into several boundary cycles, at each duplicated position.
Geometric Repair
Removal of Almost Degenerate Triangle Faces
Triangle faces of a mesh made up of almost collinear points are badly shaped elements that might not be desirable to have in a mesh. The function CGAL::Polygon_mesh_processing::remove_almost_degenerate_faces() enables removing such elements, with user-defined parameters to qualify what almost means (cap_threshold and needle_threshold). As some badly shaped elements are inevitable (the triangulation of a long cylinder with only vertices on the top and bottom circles for example), extra parameters can be passed to prevent the removal of such elements (collapse_length_threshold and flip_triangle_height_threshold).
Self-intersection Resolution (Autorefinement) in Triangle Soups
Given a soup of triangles, a self-intersection is defined as the intersection of two triangles from the soup such that the intersection is not defined by the convex hull of one, two or three shared vertices. In other words, it is an intersection that happens in the interior of one of the two triangles, or in the interior of one of their edges, except if identical points are associated to different vertices of the triangle soup which would then also include overlaps of duplicated points.
The function CGAL::Polygon_mesh_processing::autorefine_triangle_soup() provides a way to refine a triangle soup using the intersections of the triangles from the soup. In particular, if some points are duplicated they will be merged. Note that if a kernel with exact predicates but inexact constructions is used, some new self-intersections might be introduced due to the rounding of the coordinates of intersection points. The apply_iterative_snap_rounding option can be used to resolve this issue. When set to true, it ensures that the coordinates are rounded to fit in double with potential additional subdivisions, preventing any self-intersections from occurring.
Hole Filling
This package provides an algorithm for filling one closed hole that is either in a triangulated surface mesh or defined by a sequence of points that describe a polyline. The main steps of the algorithm are described in [2] and can be summarized as follows.
First, the largest patch triangulating the boundary of the hole is generated without introducing any new vertex. The patch is selected so as to minimize a quality function evaluated for all possible triangular patches. The quality function first minimizes the worst dihedral angle between patch triangles, then the total surface area of the patch as a tiebreaker. Following the suggestions in [3], the performance of the algorithm is significantly improved by narrowing the search space to faces of a 3D Delaunay triangulation of the hole boundary vertices, from all possible patches, while searching for the best patch with respect to the aforementioned quality criteria.
For complex hole boundaries, the generated patch may have self-intersections. After hole filling, the patch can be refined and faired using the meshing functions CGAL::Polygon_mesh_processing::refine() and CGAL::Polygon_mesh_processing::fair() (see Section Chapter_PMPRemeshing).
API
This package provides four functions for hole filling:
Examples
Triangulate a Polyline
The following example triangulates a hole described by an input polyline.
Example: PMP_Mesh_repair/triangulate_polyline_example.cpp
Show / Hide
#include <CGAL/Exact_predicates_inexact_constructions_kernel.h>
#include <CGAL/Polygon_mesh_processing/triangulate_hole.h>
#include <CGAL/utility.h>
#include <vector>
#include <iterator>
#include <cassert>
int main()
{
std::vector<Point> polyline;
polyline.push_back(Point( 1.,0.,0.));
polyline.push_back(Point( 0.,1.,0.));
polyline.push_back(Point(-1.,0.,0.));
polyline.push_back(Point( 1.,1.,0.));
std::vector<Triangle_int> patch;
patch.reserve(polyline.size() -2);
polyline,
std::back_inserter(patch));
for(std::size_t i = 0; i < patch.size(); ++i)
{
std::cout << "Triangle " << i << ": "
<< patch[i].first << " " << patch[i].second << " " << patch[i].third
<< std::endl;
}
std::vector<Point> polyline_collinear;
polyline_collinear.push_back(Point(1.,0.,0.));
polyline_collinear.push_back(Point(2.,0.,0.));
polyline_collinear.push_back(Point(3.,0.,0.));
polyline_collinear.push_back(Point(4.,0.,0.));
std::vector<Triangle_int> patch_will_be_empty;
back_inserter(patch_will_be_empty));
assert(patch_will_be_empty.empty());
return 0;
}
OutputIterator triangulate_hole_polyline(const PointRange1 &points, const PointRange2 &third_points, OutputIterator out, const NamedParameters &np=parameters::default_values())
creates triangles to fill the hole defined by points in the range points.
Definition: triangulate_hole.h:723
Hole Filling From the Border of the Hole
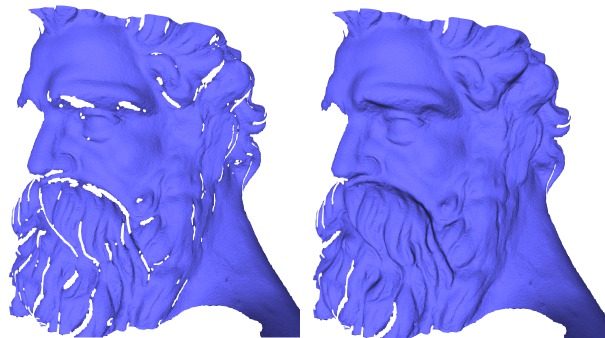
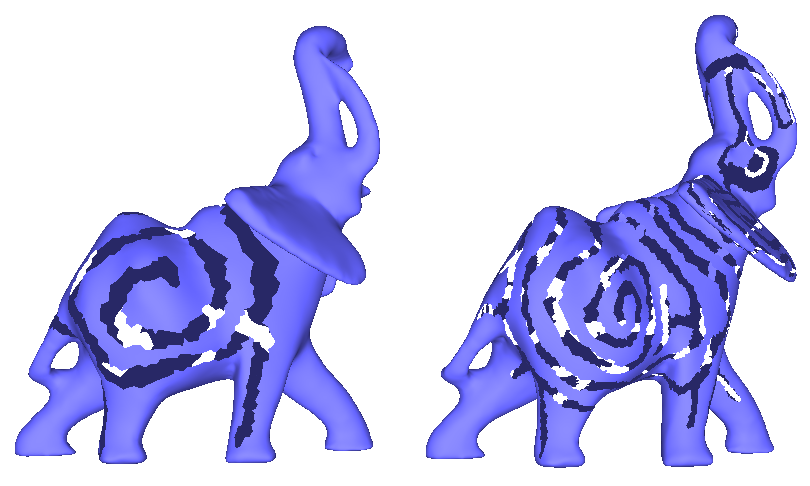
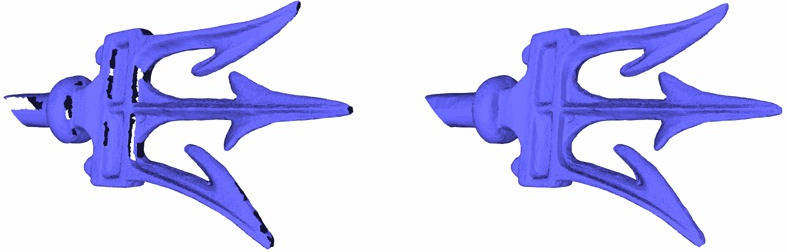
If the input polygon mesh contains one or more holes, they can be filled iteratively by detecting border edges (edges with only one incident non-null face) after each filling step.
Holes are filled sequentially, and the process stops when no border edge remains.
The example below illustrates this process, where holes are iteratively filled, refined, and faired. Optionally, only holes not exceeding a specified diameter or number of edges can be filled. This example assumes the mesh is stored in a CGAL::Surface_mesh data structure. Analogous examples for CGAL::Polyhedron_3 and other classes are available in the code base.
Example: PMP_Mesh_repair/hole_filling_example_SM.cpp
Show / Hide
#include <CGAL/Exact_predicates_inexact_constructions_kernel.h>
#include <CGAL/Surface_mesh.h>
#include <CGAL/boost/graph/border.h>
#include <CGAL/Polygon_mesh_processing/triangulate_hole.h>
#include <CGAL/Polygon_mesh_processing/IO/polygon_mesh_io.h>
#include <boost/lexical_cast.hpp>
#include <iostream>
#include <iterator>
#include <string>
#include <tuple>
#include <vector>
typedef boost::graph_traits<Mesh>::vertex_descriptor vertex_descriptor;
typedef boost::graph_traits<Mesh>::halfedge_descriptor halfedge_descriptor;
typedef boost::graph_traits<Mesh>::face_descriptor face_descriptor;
namespace PMP = CGAL::Polygon_mesh_processing;
bool is_small_hole(halfedge_descriptor h, Mesh & mesh,
double max_hole_diam, int max_num_hole_edges)
{
int num_hole_edges = 0;
{
const Point& p = mesh.point(target(hc, mesh));
hole_bbox += p.bbox();
++num_hole_edges;
if (num_hole_edges > max_num_hole_edges) return false;
if (hole_bbox.
xmax() - hole_bbox.
xmin() > max_hole_diam)
return false;
if (hole_bbox.
ymax() - hole_bbox.
ymin() > max_hole_diam)
return false;
if (hole_bbox.
zmax() - hole_bbox.
zmin() > max_hole_diam)
return false;
}
return true;
}
int main(int argc, char* argv[])
{
const std::string filename = (argc > 1) ? argv[1] :
CGAL::data_file_path(
"meshes/mech-holes-shark.off");
Mesh mesh;
if(!PMP::IO::read_polygon_mesh(filename, mesh))
{
std::cerr << "Invalid input." << std::endl;
return 1;
}
double max_hole_diam = (argc > 2) ? boost::lexical_cast<double>(argv[2]): -1.0;
int max_num_hole_edges = (argc > 3) ? boost::lexical_cast<int>(argv[3]) : -1;
unsigned int nb_holes = 0;
std::vector<halfedge_descriptor> border_cycles;
for(halfedge_descriptor h : border_cycles)
{
if(max_hole_diam > 0 && max_num_hole_edges > 0 &&
!is_small_hole(h, mesh, max_hole_diam, max_num_hole_edges))
continue;
std::vector<face_descriptor> patch_facets;
std::vector<vertex_descriptor> patch_vertices;
CGAL::parameters::face_output_iterator(std::back_inserter(patch_facets))
.vertex_output_iterator(std::back_inserter(patch_vertices))));
std::cout << "* Number of facets in constructed patch: " << patch_facets.size() << std::endl;
std::cout << " Number of vertices in constructed patch: " << patch_vertices.size() << std::endl;
std::cout << " Is fairing successful: " << success << std::endl;
++nb_holes;
}
std::cout << std::endl;
std::cout << nb_holes << " holes have been filled" << std::endl;
std::cout << "Mesh written to: filled_SM.off" << std::endl;
return 0;
}
auto triangulate_refine_and_fair_hole(PolygonMesh &pmesh, typename boost::graph_traits< PolygonMesh >::halfedge_descriptor border_halfedge, const NamedParameters &np=parameters::default_values())
triangulates, refines and fairs a hole in a polygon mesh.
Definition: triangulate_hole.h:561
OutputIterator extract_boundary_cycles(const Graph &g, OutputIterator out)
Iterator_range< Halfedge_around_face_iterator< Graph > > halfedges_around_face(typename boost::graph_traits< Graph >::halfedge_descriptor h, const Graph &g)
An additional parameter, visitor, can be used to track the algorithm's phases, enabling users to implement timeouts or monitor progress.
Example: PMP_Mesh_repair/hole_filling_visitor_example.cpp
Show / Hide
#include <CGAL/Exact_predicates_inexact_constructions_kernel.h>
#include <CGAL/Surface_mesh.h>
#include <CGAL/boost/graph/border.h>
#include <CGAL/Polygon_mesh_processing/triangulate_hole.h>
#include <CGAL/Polygon_mesh_processing/IO/polygon_mesh_io.h>
#include <CGAL/Real_timer.h>
#include <boost/lexical_cast.hpp>
#include <iostream>
#include <iterator>
#include <string>
#include <tuple>
#include <vector>
#include <stdexcept>
typedef CGAL::Real_timer Timer;
typedef boost::graph_traits<Mesh>::vertex_descriptor vertex_descriptor;
typedef boost::graph_traits<Mesh>::halfedge_descriptor halfedge_descriptor;
typedef boost::graph_traits<Mesh>::face_descriptor face_descriptor;
namespace PMP = CGAL::Polygon_mesh_processing;
bool is_small_hole(halfedge_descriptor h, Mesh & mesh,
double max_hole_diam, int max_num_hole_edges)
{
int num_hole_edges = 0;
{
const Point& p = mesh.point(target(hc, mesh));
hole_bbox += p.bbox();
++num_hole_edges;
if (num_hole_edges > max_num_hole_edges) return false;
if (hole_bbox.
xmax() - hole_bbox.
xmin() > max_hole_diam)
return false;
if (hole_bbox.
ymax() - hole_bbox.
ymin() > max_hole_diam)
return false;
if (hole_bbox.
zmax() - hole_bbox.
zmin() > max_hole_diam)
return false;
}
return true;
}
struct Stop : std::exception
{
Stop()
{}
};
struct Progress :
public PMP::Hole_filling::Default_visitor
{
Progress(double time_limit)
: time_limit(time_limit)
{}
Progress(const Progress&) = delete;
void start_planar_phase() const
{
std::cout << "Start planar phase"<< std::endl;
}
void end_planar_phase(bool success) const
{
std::cout << "End planar phase " << (success? "(success)" : "(failed)") << std::endl;
}
void start_quadratic_phase(std::size_t n)
{
timer.start();
quadratic_i = 0;
quadratic_n = n;
quadratic_report = n / 10;
std::cout << "Start quadratic phase with estimated " << n << " steps" << std::endl;
}
void quadratic_step()
{
if (quadratic_i++ == quadratic_report) {
std::cout << double(quadratic_i) / double(quadratic_n) * 100 << "%" << std::endl;
quadratic_report += quadratic_n / 10;
}
}
void end_quadratic_phase(bool success) const
{
timer.stop();
std::cout << "End quadratic phase " << timer.time() << " sec. " << (success ? "(success)" : "(failed)") << std::endl;
timer.reset();
}
void start_cubic_phase(std::size_t n)
{
timer.start();
cubic_n = n;
cubic_report = n / 10;
std::cout << "Start cubic phase with " << n << " steps" << std::endl;
}
void cubic_step()
{
if (timer.time() > time_limit) {
std::cout << "Let's stop here" << std::endl;
throw Stop();
}
if (cubic_i++ == cubic_report) {
std::cout << double(cubic_i) / double(cubic_n) * 100 << "%" << std::endl;
cubic_report += cubic_n / 10;
}
}
void end_cubic_phase() const
{
std::cout << "End cubic phase " << timer.time() << " sec. " << std::endl;
}
mutable Timer timer;
double time_limit;
std::size_t quadratic_n = 0, quadratic_i = 0, quadratic_report = 0;
std::size_t cubic_n = 0, cubic_i = 0, cubic_report = 0;
};
int main(int argc, char* argv[])
{
const std::string filename = (argc > 1) ? argv[1] :
CGAL::data_file_path(
"meshes/mech-holes-shark.off");
Mesh mesh;
if(!PMP::IO::read_polygon_mesh(filename, mesh))
{
std::cerr << "Invalid input." << std::endl;
return 1;
}
double max_hole_diam = (argc > 2) ? boost::lexical_cast<double>(argv[2]): -1.0;
int max_num_hole_edges = (argc > 3) ? boost::lexical_cast<int>(argv[3]) : -1;
unsigned int nb_holes = 0;
std::vector<halfedge_descriptor> border_cycles;
for(halfedge_descriptor h : border_cycles)
{
if(max_hole_diam > 0 && max_num_hole_edges > 0 &&
!is_small_hole(h, mesh, max_hole_diam, max_num_hole_edges))
continue;
Progress progress(10.0);
bool success = false;
try {
CGAL::parameters::visitor(std::ref(progress)).use_delaunay_triangulation(true)));
}
catch (const Stop&) {
std::cout << "We stopped with a timeout" << std::endl;
}
std::cout << " Is fairing successful: " << success << std::endl;
++nb_holes;
}
std::cout << std::endl;
std::cout << nb_holes << " holes have been filled" << std::endl;
std::cout << "Mesh written to: filled_SM.off" << std::endl;
return 0;
}
Performance
The hole filling algorithm has a complexity which depends on the number of vertices. While [2] has a running time of \(O(n^3)\) , [3] in most cases has running time of \(O(n \log n)\). We benchmarked the function triangulate_refine_and_fair_hole() for the two meshes below (as well as two more meshes with smaller holes). The machine used was a PC running Windows 10 with an Intel Core i7 CPU clocked at 2.70 GHz. The program was compiled with the Visual C++ 2013 compiler with the O2 option, which maximizes speed.
The following running times were observed:
| # vertices | without Delaunay (sec.) | with Delaunay (sec.) |
| 565 | 8.5 | 0.03 |
| 774 | 21 | 0.035 |
| 967 | 43 | 0.06 |
| 7657 | na | 0.4 |
Implementation History
Functionalities related to mesh and polygon soup repair have been introduced steadily over multiple versions since CGAL 4.10, in joint work between Sébastien Loriot and Mael Rouxel-Labbé.