- CGAL Version:
- cgal.org
- Top
- Getting Started
- Tutorials
- Package Overview
- Acknowledging CGAL

|
CGAL 6.1 - dD Frechet Distance
|
Loading...
Searching...
No Matches
|
CGAL 6.1 - dD Frechet Distance
|
This package provides the means to (approximately) compute the Fréchet distance between two polylines as well as a near neighbor data structure for polylines under the Fréchet distance, both in d-dimensional Euclidean space. A polyline is defined by a sequence of points where we interpolate linearly in-between each pair of consecutive points. In order to determine the Fréchet distance, an exact decision algorithm as well as a function that approximates the Fréchet distance arbitrarily well is included in the package. The approximation algorithm is simply a binary search that repeatedly calls the decision algorithm, hence, if possible, the latter should preferably be used when optimizing for performance.
The Fréchet distance is a classical dissimilarity measure between polylines. Its advantages over other measures are that it both considers the polylines as continuous objects and takes into account the ordering of the points. Intuitively, the Fréchet distance is commonly explained as follows: Imagine a human walking on one polyline while a dog walks on the other polyline, they are connected by a leash, and they are only allowed to walk forward. The Fréchet distance is the shortest leash length that allows the human and the dog to jointly walk from start to end on their respective trajectories where they can each vary their speed arbitrarily. The Fréchet distance is a metric. This implies that it is symmetric and that two polylines have distance zero if and only if they are equal (after removing redundant vertices).
The applications of this distance measure are plenty, for example:

The main entry points are the following functions and classes:
bounded_error_Frechet_distance() computes an approximation of the Fréchet distance between two polylines, up to a given approximation error. It returns an interval that contains the true distance.is_Frechet_distance_larger() decides if the Fréchet distance between two polylines is larger than a given bound.Frechet_distance::Neighbor_search stores a set of polylines and offers a query functions to find polylines closer to a query curve than a given bound.Both functions and the class have as template parameter a traits class defining the dimension and the point type. The traits classes have as template parameter a kernel, model of the concept Kernel. In case the static constant Has_filtered_predicates of the kernel is true, the functions combine interval arithmetic with a fallback to exact computing in case comparisons of intervals are uncertain. This means for Simple_cartesian<double> that there are no guarantees, for Simple_cartesian<Exact_rational> that all computations are performed with exact rationals, and for kernels such as Exact_predicates_inexact_constructions_kernel, Exact_predicates_exact_constructions_kernel, as well as Epick_d and Epeck_d, the computation is filtered and hence both fast and guaranteed to be correct.
The performance of the algorithm is quadratic in the number of vertices in the worst case. For all kernels with filtered predicates the performance is roughly the same, the overhead of using interval arithmetic is negligible. The algorithm is not concerned by the curse of dimensionality. The running time increases when the curves are closer or when the bound for the approximation error becomes smaller. For a very detailed analysis in practice we refer to the journal paper entitled Walking the Dog Fast in Practice: Algorithm Engineering of the Fréchet Distance [3].
The algorithms in this package are an adaption of the implementation devised by Bringmann et al. ([2] and [3]). In particular, the implementation can decide non-difficult cases very fast while for difficult cases it still has the quadratic running time guarantee of the classical Fréchet distance algorithm by Alt and Godau [1]. This is achieved by using fast bounding box filtering methods and a divide and conquer algorithm with pruning rules on the free-space diagram.
In the examples we use different kernels to illustrate that the functions can be used with either inexact or exact kernels.
The following example shows how we can use is_Frechet_distance_larger() to determines if the Frechet distance between two polylines is larger than a given distance bound.
File Frechet_distance/Frechet_distance_2.cpp
The following example shows how we can compute the Fréchet distance up to a given error bound on two polylines in 3-dimensional Euclidean space using bounded_error_Frechet_distance(). As we use Simple_cartesian<double> the algorithm uses plain floating point arithmetic without guarantees for correctness.
File Frechet_distance/Frechet_distance_3.cpp
The following example shows how we can compute the Fréchet distance up to a given error bound on two polylines in 4-dimensional Euclidean space using bounded_error_Frechet_distance().
File Frechet_distance/Frechet_distance_d.cpp
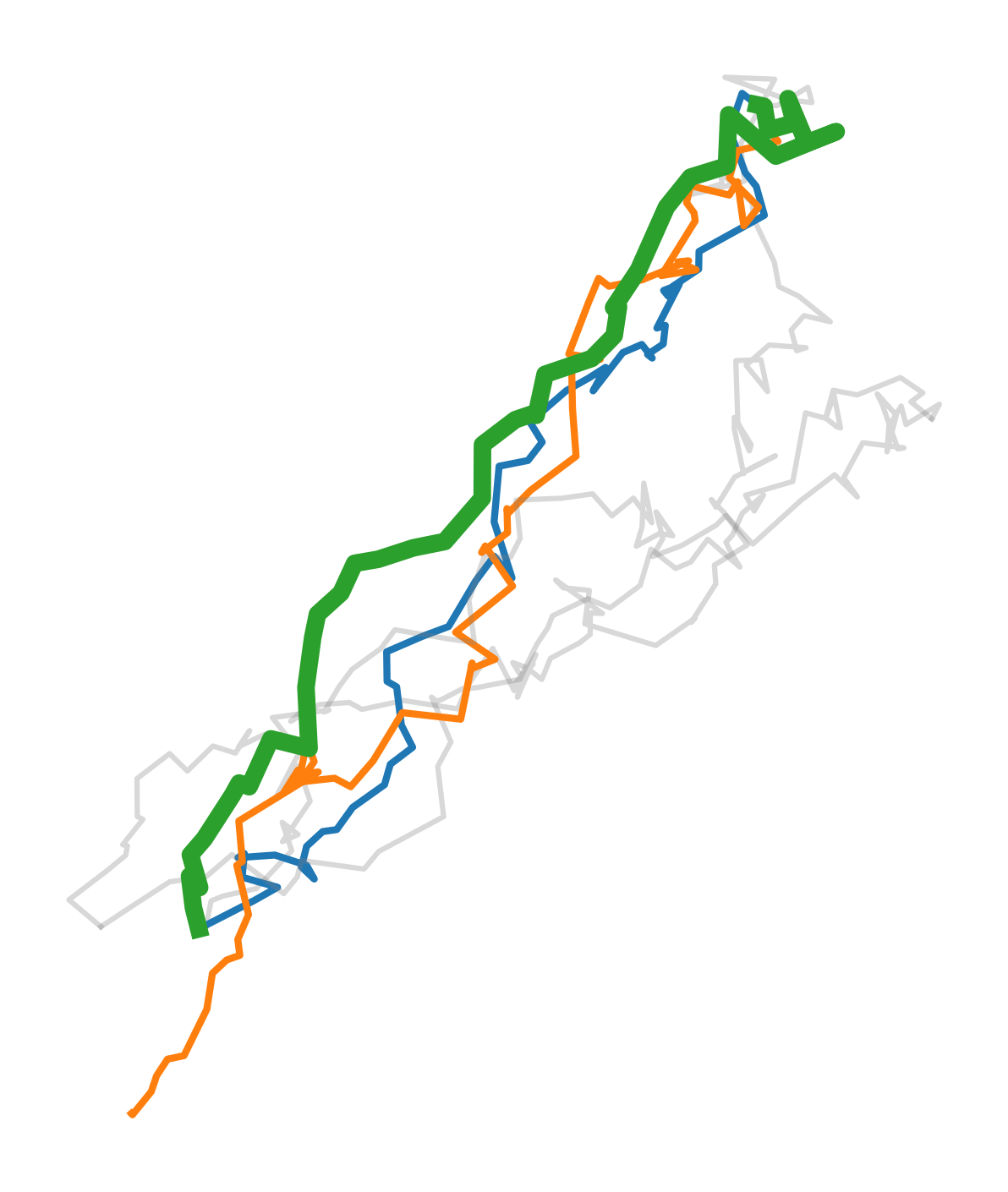
The following example shows how to store many curves in a data structure and to find all curves closer than a distance bound to a query curve.
File Frechet_distance/Frechet_DS_3.cpp
In the example below, we can see a query where:
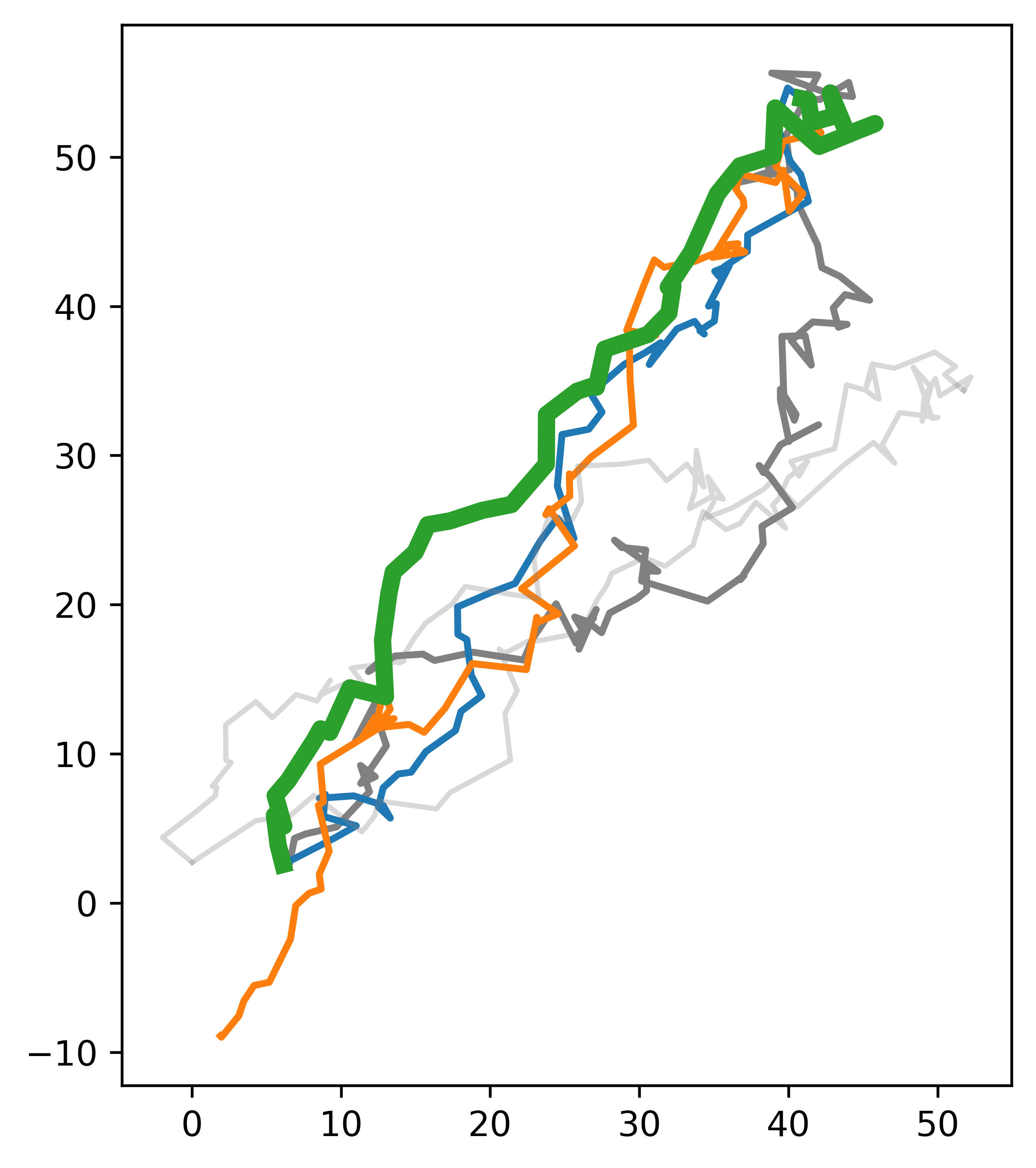
The character image is a visualization of two data points from the Character Trajectories data set.
An initial version using floating point arithmetic was developed by the authors while working at the Max-Planck Institute for Informatics in Saarbrücken, Germany. André Nusser, together with Sebastien Loriot and Andreas Fabri, introduced the usage of interval arithmetic and square root extensions to alleviate issues stemming from rounding errors and hence ensuring correctness of the computation.
